I am a postdoctoral associate at MIT AeroAstro and CSAIL, advised by Prof. Julie Shah.
I hold a Ph.D. in Autonomous Systems from MIT (also advised by Prof. Julie Shah),
an M.S. in Robotics from Carnegie Mellon University (co-advised by Prof. Prof. Siddhartha Srinivasa and Prof. Prof. Stephanie Rosenthal),
and dual B.S. degrees in Computer Science and Psychology from the Pennsylvania State University.
My research focuses on developing algorithms and interfaces that enable human users to easily customize robots to their specific needs, particularly in factory automation. I also develop methods that allow robots to collaborate with and assist humans safely and efficiently in home and everyday settings.
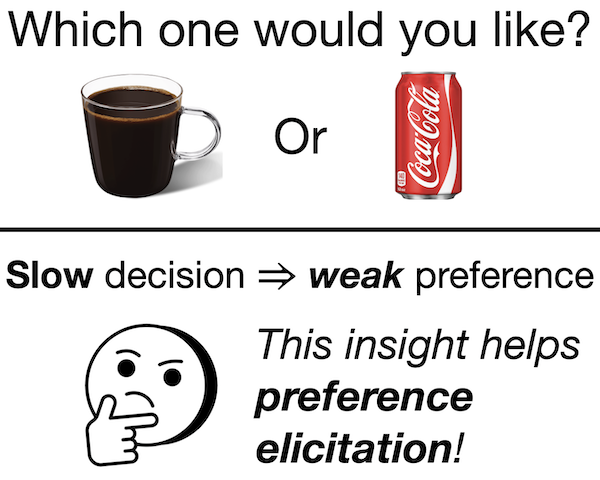
The key contribution is the first preference-based bandits algorithm to incorporate human response times as implicit feedback. By interpreting response times using the EZ-diffusion model from psychology, this work both theoretically and empirically demonstrates that response times provide valuable insights into preference strength, significantly improving learning efficiency. This research lays the foundation for future advancements in robot personalization, recommender systems, and fine-tuning large language models (LLMs).
Temporal Logic Imitation: Learning Plan-Satisficing Motion Policies from Demonstrations
The key contribution is the first multi-modal policy learning framework that provides theoretical guarantees of robustness against both task- and motion-level human interventions, without requiring predefined mode boundaries. By combining offline imitation learning with online policy adaptation, the learned policy ensures that a robot remains within the correct mode boundaries despite human interventions, leading to a significantly higher task success rate in empirical evaluations.
MIT Museum Interactive Robot Permanent Exhibit (from 09/2022)
The key contribution is the first RL planning algorithm that addresses non-Markovian and uncertain objectives, represented as a belief distribution over linear temporal logic formulas. This approach allows robots to plan behaviors based on task specifications learned from potentially noisy human demonstration data.
MIT Museum Interactive Robot Permanent Exhibit (from 09/2022)
This journal paper builds on our earlier conference work (see below) by introducing the ability to learn task specifications both inductively, from positive examples only, and from a combination of positive and negative examples. Additionally, the journal version expands the empirical evaluation to a multi-agent domain.
Bayesian Inference of Temporal Task Specifications from Demonstrations
The key contribution is one of the first algorithms for task specification learning that accurately infers linear temporal logic formulas from potentially noisy human demonstration data, while incorporating uncertainty estimates to enhance the reliability of the inference.
2. Human–robot collaboration and assistance
Set-based State Estimation with Probabilistic Consistency Guarantee under Epistemic Uncertainty
The key contribution is the first set-based state estimator that guarantees probabilistic consistency under nonlinear dynamic and observation models learned from offline datasets. We theoretically and empirically demonstrate that accounting for uncertainty in learning errors improves estimation performance. This approach has been successfully applied to interpret human sensor signals as implicit feedback to estimate latent human states in a robot-assisted dressing task.
Provably Safe and Efficient Motion Planning with Uncertain Human Dynamics
The key contribution is the integration of human safety constraints, defined as either collision avoidance or low-impact collisions, into an MPC algorithm with theoretical safety guarantees. Compared to the traditional approach of focusing solely on collision avoidance, our novel safety definition enables the robot to be less conservative while personalizing its trajectories online, using human physical behavior as implicit feedback.
Semi-Supervised Learning of Decision-Making Models for Human-Robot Collaboration
The key contribution is the first personalization framework for multi-step collaborative tasks that hierarchically models human implicit feedback as subgoals and motion, learned offline in a semi-supervised manner without fully labeled subgoals. During online interaction, the robot efficiently adapts to unobserved, evolving human subgoals. Empirical results demonstrate that our framework eliminates the need for labeled subgoals, offers flexibility in specifying task structures, and does so without compromising performance.
Decision-Making for Bidirectional Communication in Sequential Human-Robot Collaborative Tasks
The key contribution is the first personalization framework for multi-step collaborative tasks that hierarchically leverages human behavior as implicit feedback and uses verbal communication as explicit feedback. Our empirical results show that, with both types of feedback, the system appropriately decides if, when, and what to communicate to the human.
MIT Museum Interactive Robot Permanent Exhibit (from 09/2022)
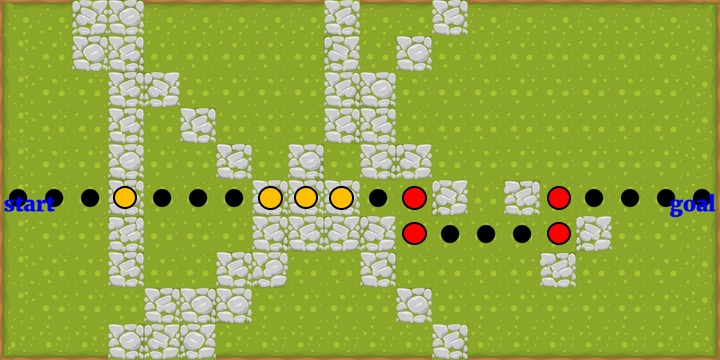
The key contribution is a hierarchical task-and-motion planning algorithm that efficiently adapts to various human interventions by engaging only the necessary planning layer, avoiding full replanning. By integrating linear temporal logic, incremental graph search, behavior trees, and motion primitives, the system empirically demonstrates efficient adaptation to interventions like object relocation, addition, and removal in both simulated and real-world environments.
Fast Online Segmentation of Activities from Partial Trajectories
The key contribution is an activity recognition algorithm that identifies activity labels using partial human trajectories as implicit feedback before the activities are fully completed, with human behavior modeled as an ensemble of Gaussian Mixture Models. Our empirical results show that this approach significantly enhances activity recognition accuracy, even when only incomplete trajectory data is available.
Safe and Efficient High Dimensional Motion Planning in Space-Time with Time Parameterized Prediction
This paper introduces a motion planner that constructs a roadmap to efficiently approximate the high-dimensional robot configuration and time space, enabling faster planning for robots to avoid dynamic obstacles. Empirical results show that our method consistently produces collision-free, efficient trajectories with significantly reduced planning times.
3. Human factors in robotics
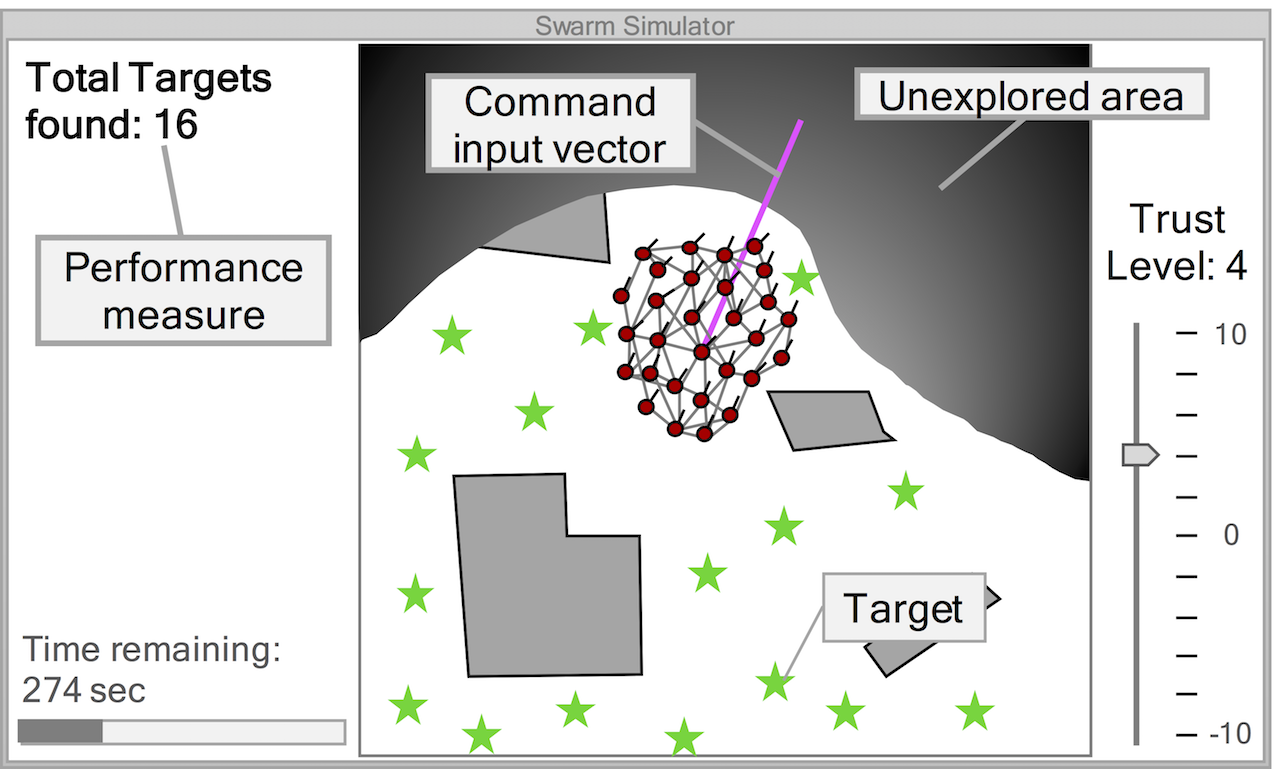
Trust of Humans in Supervisory Control of Swarm Robots with Varied Levels of Autonomy